
Das Projekt „Begleit- und Wirkungsforschung zum automatisierten und vernetzten Fahren, kurz bwirkt“, hatte das Ziel, erarbeitetes Wissen über das automatisierte Fahren aus verschiedenen Forschungsaktivitäten und Projekten im Rahmen des Testfelds Autonomes Fahren Baden-Württemberg (TAF BW) zu bündeln. Zudem wurden die Wirkungen der laufenden Projekte evaluiert und der notwendige Wissenstransfer in Richtung Politik, Wirtschaft und Gesellschaft beschleunigt. Vor diesem Hintergrund standen die Projektaktivitäten aus dem TAF BW im engen Austausch mit weiteren Projekten im Rahmen des Förderprogramms „Smart Mobility“.
Im Rahmen von bwirkt wurde ermittelt, inwiefern verkehrliche, technologische, gesellschaftliche und rechtliche Wirkungen festzustellen sind und wie diese zu bewerten sind. Hierbei lag der inhaltliche Schwerpunkt auf verkehrlichen Wirkungen des automatisierten Fahrens bzw. des TAF BW. Das Projekt „bwirkt“ wurde im Konsortium aus dem FZI Forschungszentrum Informatik, dem Karlsruher Institut für Technologie (KIT) und e-mobil BW bearbeitet.
Die e-mobil BW war im Rahmen des Projektes für die Ausrichtung von Statusseminaren und Workshops zuständig. Darüber hinaus wurden gesellschaftliche Aspekte des TAF BW beleuchtet. So wurden unter anderem in Nutzerworkshops Bedürfnisse, Ängste und Wünsche der Verkehrsteilnehmer ermittelt und geeignete Kommunikationsstrategien erarbeitet.
Im Rahmen des Projekts „bwirkt“ wurden immer wieder ähnliche Fragen zum automatisierten und vernetzten Fahren (AVF) gestellt. Aus diesem Grund wurden diese gemeinsam mit dem Karlsruher Institut für Technologie (KIT) sowie dem FZI Forschungszentrum für Informatik gesammelt und ausgearbeitet. Die Antworten können im Folgenden eingesehen werden.
Zudem hat die e-mobil BW im Rahmen des e-mobil BW Stream ein Kurzvideo zur Einführung in AVF erstellt.
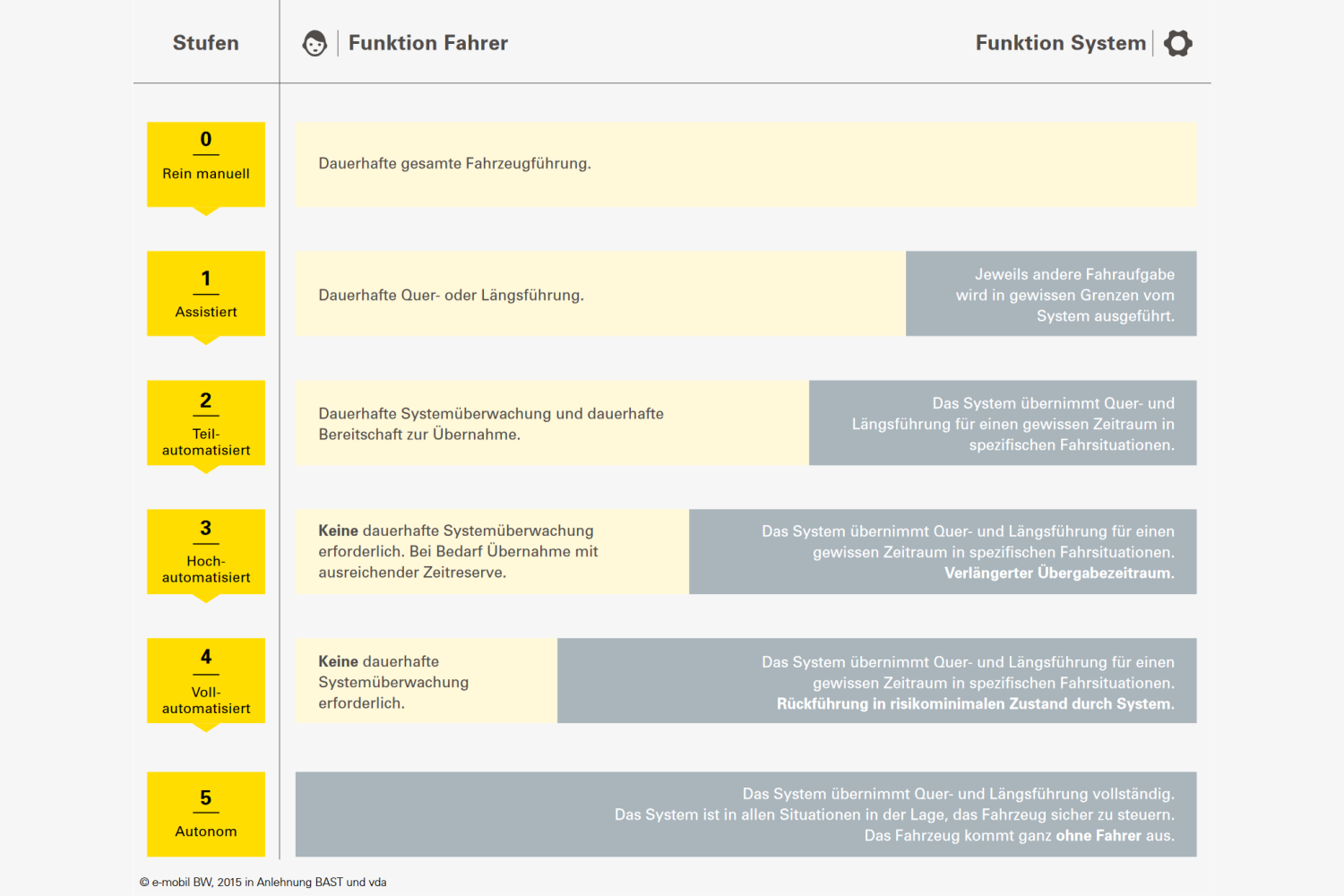
Es gibt unterschiedliche Definitionen des automatisierten und vernetzten Fahrens (AVF). Wichtig ist, zwischen dem automatisierten und dem autonomen Fahren zu unterscheiden. Die deutschen Autobauer (OEM), der Verband der Automobilindustrie e.V. (VDA) und die Bundesanstalt für Straßenwesen (BASt) haben sich auf grundsätzliche Stufen des autonomen Fahrens geeinigt:
Weitere Informationen bietet die englische Webseite der SAE International.
Quelle: BASt
Automatisiertes und vernetztes Fahren (AVF) bietet enorme Wachstums- und Wohlstandschancen für Baden-Württemberg:
Quelle: BMVI
Neben den Chancen bestehen auch wesentliche Herausforderungen, die u.a. auch Voraussetzungen für die Technik und Nutzung des automatisierten und vernetzten Fahrens (AVF) schaffen. Besonders wichtig ist das im Falle eines Mischverkehrs, bei dem sich konventionelle Fahrzeuge mit automatisierten bzw. autonomen Fahrzeugen gleichzeitig im Verkehr bewegen. Beispiele sind u.a.
Quelle: acatech
In Deutschland gibt es aktuell 14 digitale Testfelder zur Erforschung von automatisiertem und vernetztem Fahren. Mit dem Testfeld Autonomes Fahren Baden-Württemberg (TAF-BW) und dem Testfeld Friedrichshafen befinden sich zwei davon in Baden-Württemberg (Stand: September 2020).
Daneben bestehen zahlreiche Teststrecken und Reallabore, die durch Forschungsprojekte initiiert wurden. Jedes dieser angeführten Testfelder verfolgt verschiedene Erprobungsschwerpunkte und ist mit entsprechender Ausstattung versehen. Die Testfahrten finden sowohl auf Autobahnen, Bundes- und Landstraßen und im Stadtverkehr, aber auch auf Parkplätzen und -häusern statt. Ziel ist es, mithilfe der digitalen Testfelder neue Technologien zu prüfen und zu erproben, um so detailliertes Wissen über die verschiedenen Möglichkeiten des AVF zu erlangen.
Das Digitale Testfeld Deutschland-Frankreich-Luxemburg verfügt über grenzüberschreitende Teststrecken. Neben Deutschland, Frankreich und Luxemburg gibt es in Europa zahlreiche separate Testfelder für automatisiertes und vernetztes Fahren, darunter in Österreich, Schweden und den Niederlanden. Außerhalb Europas werden unter anderem in den USA und Australien Testfelder betrieben.
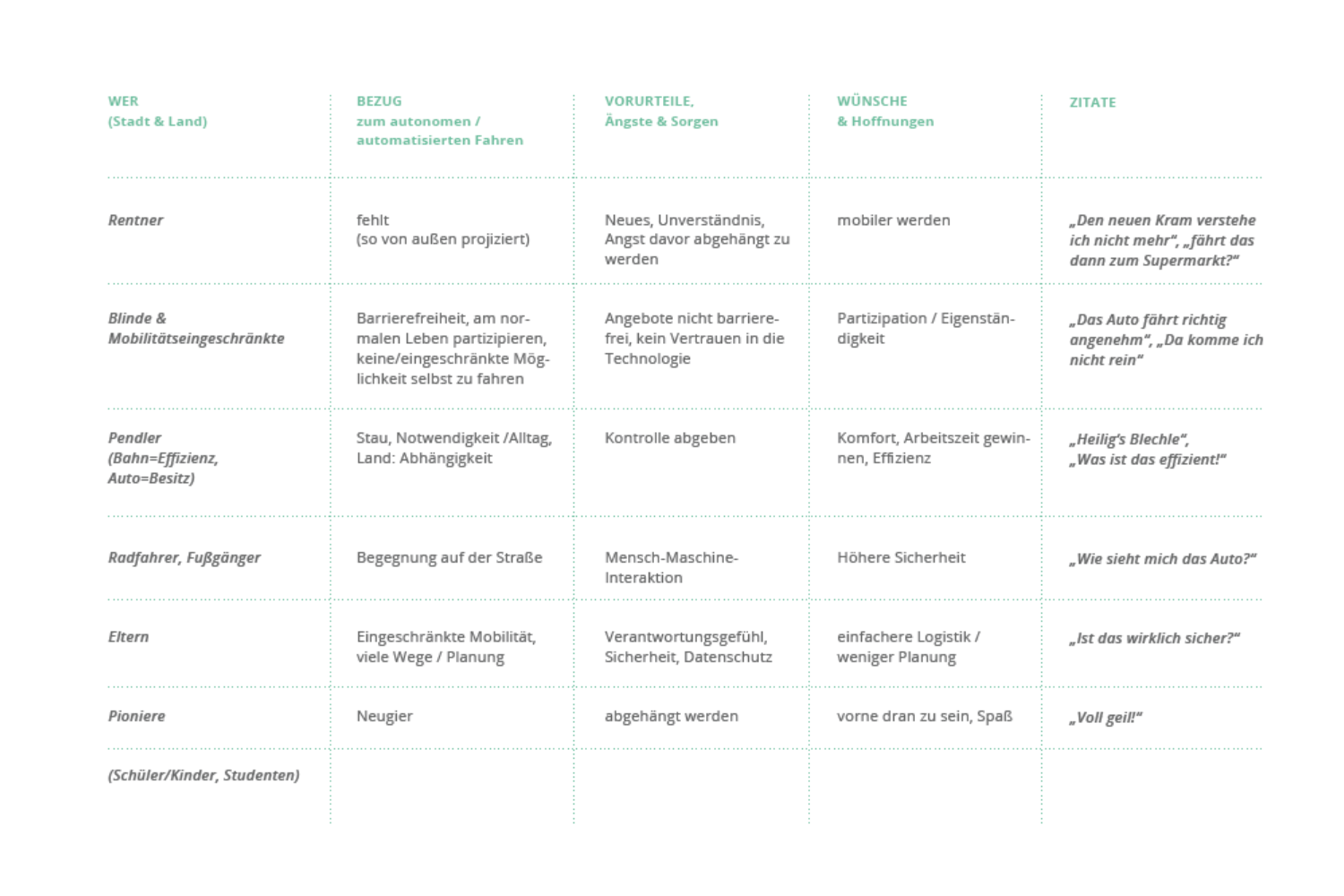
Im Rahmen des Projekts bwirkt wurden mit der Design-Thinking-Methode sieben Nutzergruppen identifiziert:
Diese Nutzergruppen machen die unterschiedliche Wahrnehmung (Sorgen, Hoffnungen) sowie den vielfältigen Bedarf der unterschiedlichen Gruppen deutlich. Sie bilden gleichzeitig auch die breite Öffentlichkeit ab, die das automatisierte Fahren ansprechen und benutzen kann.
Das autonome Fahren bezieht sich auf die letzte bzw. höchste Stufe der Automatisierung in einem Fahrzeug, bei dem das Fahrzeug komplett ohne Fahrzeugführer:in agieren kann. Hierbei übernimmt das Fahrzeug alle Funktionen, die sonst der Fahrer / die Fahrerin in einem nicht-automatisierten Fahrzeug tätigen würde.
Videokameras und Sensoren (z.B. Radarsensoren, Laserscanner oder Infrarotsensoren) nehmen ständig die Umgebung eines Fahrzeugs auf und ermitteln dadurch die Entfernung zu Objekten. Dadurch werden Personen und Gegenstände vom Fahrzeug wahrgenommen. Mobil- und WLAN-Netze oder GPS-Systeme helfen dabei mit anderen Fahrzeugen sowie der Infrastruktur zu kommunizieren. Hierbei kategorisieren automatisierte und autonome Fahrzeuge die Umwelt in verschiedene Objekte (z.B. Fahrbahn, andere Fahrzeuge, Menschen, etc.), um daraus jeweils Schlüsse auf den Umgang mit diesem Objekt zu ziehen. Wichtig sind auch sehr präzise Karten und GPS-Material mit zentimetergenauen Angaben, damit das Fahrzeug seine selbst aufgenommene Daten aus der Umgebung abgleichen kann.
Quelle: ADAC
Der Wettbewerb um die beste Technologie ist weltweit in vollem Gange. Momentan bewegt sie sich in Deutschland auf Level-3: hochautomatisiert. Schon jetzt werden autonome Fahrzeuge auf deutschen Straßen getestet (siehe Frage 4), sodass Deutschland eine führende Rolle beim autonome und vernetze Fahren einnimmt. Dank des Gesetzes zum automatisierten Fahren ist Deutschland weltweit das erste Land, das fahrerlose Kraftfahrzeuge im Regelbetrieb sowie im gesamten nationalen Geltungsbereich erlaubt.
Obwohl der Stand der Technik (Stand 2021) in den USA mutmaßlich weiter vorangeschritten ist als in Deutschland (z.B. die Google-Tochter Waymo oder Tesla), wird das autonome und vernetze Fahren in Deutschland durch den stetigen Ausbau der digitalen Infrastruktur und dem Sammeln und Analysieren von Daten entscheidend vorangetrieben.
Der Technologiekalender der Landeslotsenstelle Transformationswissen BW bietet eine gute Übersicht über den aktuellen Stand der Technik im Bereich autonomes und vernetztes Fahren.
Die meisten Expertinnen und Experten sind sich darin, dass langfristig durch den Einsatz von automatisierten und vernetzten Fahrzeugen (AVF) die Verkehrssicherheit verbessert werden kann. Schon heute zeigt der Blick auf die deutsche Verkehrsunfallstatistik des Statistischen Bundesamts, dass AVF die Verkehrssicherheit verbessert. Zum einen gehen die Unfallzahlen mit Personenschäden und Verkehrstoten zurück, zum anderen wird die häufigste Unfallursache „Menschliches Versagen“ (Abstandsfehler, unangepasste Geschwindigkeit oder Unachtsamkeit) durch AVF reduziert.
Verbesserungspotentiale ergeben sich durch Assistenzsysteme und voranschreitende Vernetzung.
Eine quantitative Aussage über mögliche Verbesserungspotentiale fällt aufgrund der fehlenden Praxiserfahrung mit derartigen Fahrzeugen allerdings noch schwer.
Gemessen an der Norm ISO 26262 gilt ein System dann als sicher, wenn von ihm kein „unzumutbares Risiko“ ausgeht. Die Zumutbarkeit wird anhand moralischer, ethischer und gesellschaftlicher Prinzipien festgelegt. Die Grenze des zumutbaren Risikos von AVF wird – wie auch bei konventionellen Fahrzeugen – vom deutschen Gesetzgeber geregelt. Erst wenn AVF vollständig als „sicher“ eingestuft wird, erfolgt eine Zulassung im deutschen Straßenverkehr.
Aktuell befindet sich die Technologie noch im Entwicklungsstadium. AVF ähneln in der Konstruktion und dem prinzipiellen Aufbau stark konventionellen Fahrzeugen. Zulassungsrelevante Prüfkriterien für die Sicherheit von AVF werden sich daher verstärkt auf neue Fahrzeugeigenschaften konzentrieren, während die Sicherheit bereits etablierter Fahrzeugkomponenten weniger in Frage gestellt werden muss.
Die positiven Auswirkungen von AVF auf die Sicherheit im Straßenverkehr setzen voraus, dass die eingesetzte Technologie ausgereift, stabil und widerstandsfähig ist und zugrundeliegende Datenarchitektur sicher vor unbefugten Zugriffen ist. Drei neue Risikofaktoren müssen in der zukünftigen Entwicklung noch vollständig beherrschbar gemacht werden:
Durch die Automatisierung von Fahrzeugen entstehen mögliche Veränderungen im Verkehrssystem (z.B. durch geändertes Fahrverhalten oder Nutzungsweisen). Für einen vollständig autonomen Verkehr (sogenanntes Level 5) bedeutet das:
Wenn Abstand und Kommunikation zwischen den Fahrzeugen automatisch geregelt wird, können Kolonnen aus Fahrzeugen gebildet werden, die einander mit sehr geringem Abstand folgen (sogenannte Platoons). Dadurch wird der Verkehrsfluss aufeinander abgestimmt. Wie groß diese Effekte voraussichtlich sein werden, ist Gegenstand laufender Forschung (siehe z.B. TAF BW).
In Gebieten mit geringer Nachfrage können autonome Fahrzeuge zum Beispiel auf Abruf und unabhängig von Tageszeiten, Takten oder Feiertagen fahren. Bereits heute sind diese sogenannten Ridepooling-Dienste vereinzelt im Einsatz. Da allerdings derzeit eine Fahrerin / ein Fahrer pro Fahrzeug benötigt wird, sind die Dienste derzeit kostenintensiv. Beispiele für automatisierten ÖPNV gibt es in Karlsruhe mit dem Projekt EVA-Shuttle, in Mannheim und in Friedrichshafen mit dem Projekt RABus sowie in Waiblingen mit dem Projekt Ameise.
Bei autonomen Fahrzeugen besteht nicht mehr die Notwendigkeit, dass jeder ein Auto besitzt. Solange man selbst das Fahrzeug nicht braucht, kann jemand anderes damit fahren. Auch Personen die aufgrund körperlicher, geistiger oder anderer Einschränkungen bisher nicht in der Lage waren, die Vorteile individueller Mobilität zu nutzen, könnten durch autonome Fahrzeuge einen Zugang erhalten. Daraus ergeben sich zwei Szenarien:
Unklar ist noch, ob sich diese Effekte gegenseitig aufheben, oder einer von beiden überwiegt. Hinzu kommt, dass politisch-gesellschaftliche Entscheidungen getroffen werden können, um die Entwicklung von AVF und deren Nutzung zu beeinflussen: Ist das Fahren von Autos ohne Insassen erlaubt? Wollen Menschen nach wie vor ein eigenes Auto besitzen oder steigen Car-Sharing Angebote?
Die Kommunikation von AVF ist komplex und vielschichtig. Für die Kommunikation mit der unmittelbaren Umgebung, insbesondere zur Interaktion mit Menschen, muss ein AVF seine Fahrtabsichten optisch oder akustisch und von außen wahrnehmbar darstellen können. Hierbei besteht die Herausforderung darin, klar verständliche Signale zu finden, um nonverbale Kommunikation menschlicher Fahrer zu ersetzen, z.B. den Blickkontakt zwischen Fußgängern und Pkw-Fahrern an Zebrastreifen. Die Forschung und Entwicklung hierzu läuft.
Zur Kommunikation mit anderen Fahrzeugen und der Infrastruktur gibt es mehrere technische Möglichkeiten. Hierbei geht es um Datenverbindungen über die Informationen zu Geschwindigkeiten, Straßen- und Verkehrszustand, Ereignissen und Fahrtabsichten gesendet und empfangen werden. Diese Datenpakete können über Datennetze wie WLAN-Standards oder Mobilfunk (LTE oder 5G) übertragen werden.
Autonome Fahrzeuge, die heute schon zum Testen am Verkehr teilnehmen, benötigen in der Regel keine zusätzlichen Infrastrukturelemente. Die an Bord verbaute Hardware ist in der Lage, Signale der Verkehrssteuerung und von anderen Verkehrsteilnehmerinnen und -teilnehmern wahrzunehmen und auf diese zu reagieren.
Die Sensorik eines autonomen Fahrzeuges (Level 5) erzeugt etwa 9 GB Daten pro Sekunde. Diese Daten müssen nicht nur gespeichert, sondern auch möglichst schnell verarbeitet werden, damit das autonome Fahrzeug seine Umgebung interpretieren und passend darauf reagieren kann. Dies erfordert enorme Berechnungskapazitäten. Aktuell gibt es zwei Ansätze, das umzusetzen:
Beide Ansätze unterliegen großen Unsicherheiten und Abhängigkeiten: von der Entwicklung rechtlicher Anforderungen bis zur technischen Weiterentwicklung von Speicher-, Funk-, Sensor- und Rechentechnik. Nach heutigem Stand ist eine Kombination aus den beiden beschriebenen Ansätzen wahrscheinlich.
Die heutigen Systeme zur Lokalisierung, wie z.B. GPS, sind zu ungenau, um als einzige Lokalisierungsquelle verwendet zu werden. Ein AVF muss jedoch zu jeder Zeit seine Position auf wenige Zentimeter genau kennen. Hierzu sind hochauflösende, dreidimensionale Karten des Straßenraumes notwendig. Anhand geometrischer Formen innerhalb der digitalen Karte, wie z.B. Häuser, Straßen oder Bordsteine, kann sich ein AVF exakt lokalisieren. Ähnlich wie bei heutigen Karten für die GPS-basierte Navigation wird es eine große Aufgabe sein, diese Karten auf dem aktuellen Stand zu halten.
Ein neues Potential entsteht beim AVF darin, dass zusätzlich auch Informationen zur Fahrtabsicht seitens der Fahrzeuge existieren. Dadurch kann die Verkehrssteuerung noch früher z.B. auf rote Ampeln reagieren. Autonome Fahrzeuge können die bestehende Infrastruktur zur Verkehrssteuerung auch dann interpretieren und darauf reagieren, wenn kein Datenaustausch stattfindet.
Die aktuelle Rechtslage erlaubt das hoch- und vollautomatisierte Fahren unter bestimmten Voraussetzungen. Die Letztverantwortung verbleibt z.B. weiterhin bei der Fahrerin / dem Fahrer (§ 1 StVG). Für den Regelbetrieb entscheidend sind das Wiener Übereinkommen über den Straßenverkehr sowie die auf UNECE-Ebene erlassenen Regularien. Diese wurden jüngst weiterentwickelt, um z.B. Zulassungsvoraussetzungen für einen Autobahnstaupiloten zu schaffen.
Die Automatisierung und Vernetzung der Fahrzeuge führt dazu, dass neue Schwerpunkte für den Zulassungsprozess relevant werden: von der Sicherstellung einer adäquaten IT-Sicherheit über den Datenschutz beim Umgang mit personenbezogenen Daten oder die Einhaltung der Straßenverkehrsregeln bis hin zu Fragen rund um Pflichten zu regelmäßigen Softwareupdates und deren sichere Umsetzung.
In Deutschland plante das BMVI 2021 einen Vorstoß vollständig autonomes Fahren, also fahrerloses Fahren in bestimmten Betriebsbereichen, zu erlauben. Dies hätte insbesondere sogenannte „People-Mover“ ermöglicht, die vordefinierte Strecken abfahren und Personen befördern. Streitpunkt sind aktuell v.a. die Regelungen zur Datennutzung.
Das Haftungssystem hat auch bei der Automatisierung der Mobilität weiter Bestand. Über die Haftungsfigur der Halterhaftung (§ 7 StVG), in Kombination mit der Versicherungspflicht wird sichergestellt, dass Unfallschäden ausgeglichen werden. Liegt ein Produktfehler vor, kann die Halterin oder der Halter (bzw. in der Praxis deren Versicherung, § 86 VVG) Ersatzansprüche beim Hersteller stellen (Produkthaftung nach §§ 1 ff. ProdHaftG bzw. Produzentenhaftung nach § 823 Abs. 1 BGB). Mit der Zunahme softwaregestützter Fahrsysteme wird die Pflicht der Fahrzeugproduzenten zur Produktbeobachtung bedeutender (Produzentenhaftung). Die Fahrzeugführerin / der Fahrzeugführer ist nach wie vor zum Schadensersatz verpflichtet (§ 18 StVG), außer es kann nachgewiesen werden, dass sie kein Verschulden trifft. Dies wäre der Fall, wenn das Fahrzeug autonom gesteuert wurde.
Im Hinblick auf die Fähigkeit von KI-Systemen autonome Entscheidungen zu treffen, wird darüber diskutiert, ob Sorgfaltsanforderungen im Rahmen des Haftungsrechts angepasst, neue Gefährdungstatbestände geschaffen oder gar eine neue Haftungsrolle der elektronischen Person kreiert werden müssten. Eine Reform des Haftungsrahmens im Straßenverkehr ist aktuell nicht vorgesehen.
Beim automatisierten und vernetzten Fahren fallen meistens personenbezogene Daten an, sodass das Datenschutzrecht regelmäßig berührt wird. Dies betrifft einerseits Daten über den Zustand und Betrieb des Fahrzeugs (Auskunft über Fahrer/in und Fahrzeuginsassen) als auch den Einsatz von Umgebungssensoren (Auskunft über andere Verkehrsteilnehmende wie z.B. Fußgänger/Fußgängerinnen, Radfahrer/Radfahrerinnen oder Kfz-Kennzeichen anderer Fahrzeuge).
Jede Form der Verarbeitung personenbezogener Daten muss auf eine Einwilligung oder andere gesetzliche Rechtsgrundlage gestützt werden (Art. 6 Abs. 1 DSGVO). Daneben sind die Grundprinzipien des Datenschutzrechts einzuhalten: Rechtmäßigkeit, Verarbeitung nach Treu und Glauben, Transparenz, Zweckbindung, Datenminimierung, Richtigkeit, Speicherbegrenzung sowie Integrität und Vertraulichkeit (Art. 5 Abs. 1 DSGVO). Der/Die Verantwortliche muss deren Einhaltung nachweisen können (Rechenschaftspflicht). Verantwortlich ist die Stelle, die allein oder gemeinsam über den Zweck und die Mittel der Datenverarbeitung (mit-)entscheiden.
Beim autonomen Fahren relevante Rollen sind zunächst Halter/Halterin und Hersteller (sowie ggf. Werkstätten, Händler, Versicherungen, Mobilitätsdienstleister, etc.). Verursacht eine Datenverarbeitung hohe Risiken für die Rechte und Freiheiten betroffener Personen, müssen technische und organisatorische Maßnahmen ergriffen werden, um diese Risiken zu kompensieren (Art. 25 DSGVO, Art. 32 DSGVO, Art. 35 DSGVO).
Maßgeblich für das AVF sind sogenannte Dilemmasituationen, also z.B. wenn ein Unfall unvermeidbar erscheint, sollte das Auto ein Ausweichmanöver versuchen und ggf. Passanten verletzen oder geradewegs auf ein anderes Auto zusteuern? Aus rechtlicher Sicht hat jedes menschliche Leben den gleichen Wert – ohne Rücksicht auf das Alter oder die Anzahl betroffener Menschen. Die Auswahl einer Person oder Personengruppe zur Rettung oder zum Schutz anderer ist somit ausgeschlossen (BVerfGE 115, 118 – 166).
Generell ist die Frage nach der Wirtschaftlichkeit des AVF noch nicht geklärt, da die Technologie größtenteils noch in ihrer Entwicklungsphase steckt. Automatisierte Elemente sind bereits heute in Form von Fahrerassistenzsystemen verbaut und sind damit bereits wirtschaftlich.
Durch die zunehmende Automatisierung ist eine Veränderung im Markt sowohl im Sektor des öffentlichen Verkehrs als auch in der Automobilbranche zu erwarten. Hierbei sollte zwischen Individualverkehr (IV), öffentlichem Personenverkehr (ÖPNV) und Güter- und Logistikverkehr differenziert werden. Mit der Individualisierung und Flexibilisierung des öffentlichen Verkehrs (ÖPNV und Logistikverkehr) ist mit einer neuen Dynamik und damit einer neuen Konkurrenz zu rechnen, die den Verkehr nachhaltig verändern wird.
Auch Automobilhersteller sehen sich einer veränderten Rolle gegenüber: von einer bisher Hardware-basierenden Entwicklung hin zu einer mehr Software-basierten Entwicklung. Dadurch wird sich langfristig auch die Wertschöpfungskette und das betriebliche Know-how verändern.
Ob automatisiertes und vernetztes Fahren positive oder negative ökologische Auswirkungen im Vergleich zum heutigen Status Quo mit sich bringt, ist noch nicht absehbar. Dies wird vor allem davon abhängen, in welchem Umfang und für welche Zwecke das AVF eingesetzt wird. Unter der Annahme, dass alle AVF elektrisch angetrieben sein werden, ergeben sich folgende positiven sowie negativen ökologischen Wirkungen:
Welche Effekte am Ende stärker ausfallen werden, wird neben der individuellen Nutzung der Fahrzeuge zusätzlich von politisch-gesellschaftlichen Entscheidungen abhängen.
